☞ 메인보드 : Jetson Nano Developer Kit
☞ 운영 체제 : Ubuntu 18.04 - JetPack 4.3
<이전 포스트>
1. 이미지 삽입, 포맷 그리고 백업
# 이미지 삽입 1) Rufus 다운로드 https://rufus.ie/ 2) Rufus 사용방법 장치 : 컴퓨터에 인식된 장치 부트 선택 : 이미지 파일 삽입 > '선택' 버튼 클릭 후 파일 선택 SD 카드에 삽입할 파일 선택 시작 버튼..
95mkr.tistory.com
목차
① 젯슨 나노 보드에 Ubuntu 18.04 설치
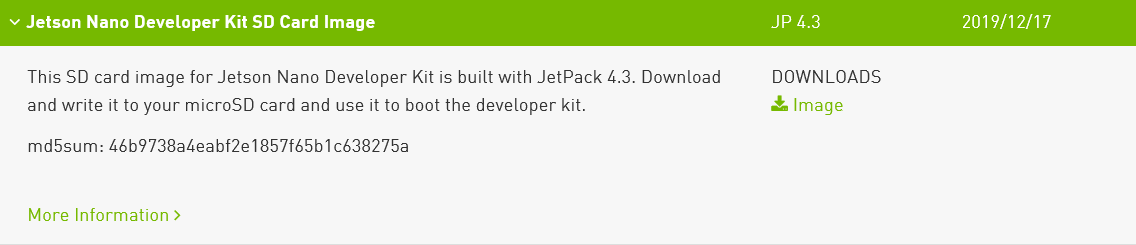
이미지 파일 다운로드
Jetson Download Center
Get downloadable documentation, software, and other resources for the NVIDIA Jetson ecosystem.
developer.nvidia.com
Rufus 실행 > 다운로드한 이미지 파일 삽입
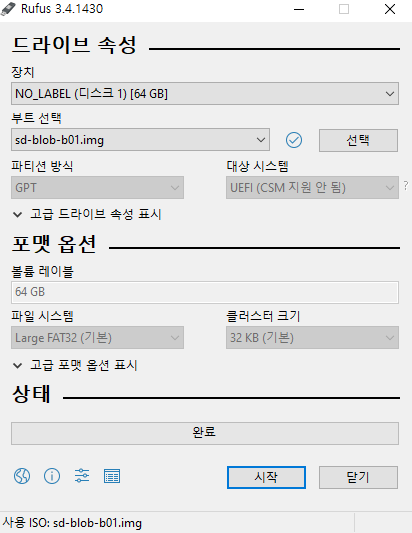
완료 후 SD 카드 나노 보드에 삽입
부팅이 되면 안내에 따라 우분투 설치
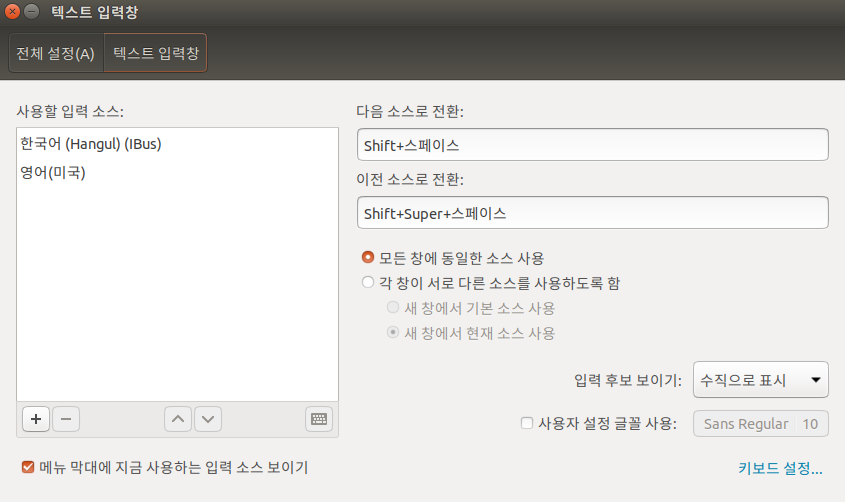
② 한글 팩 설치(키보드 설정)
우분투 설치 후 소프트웨어 업데이트 진행
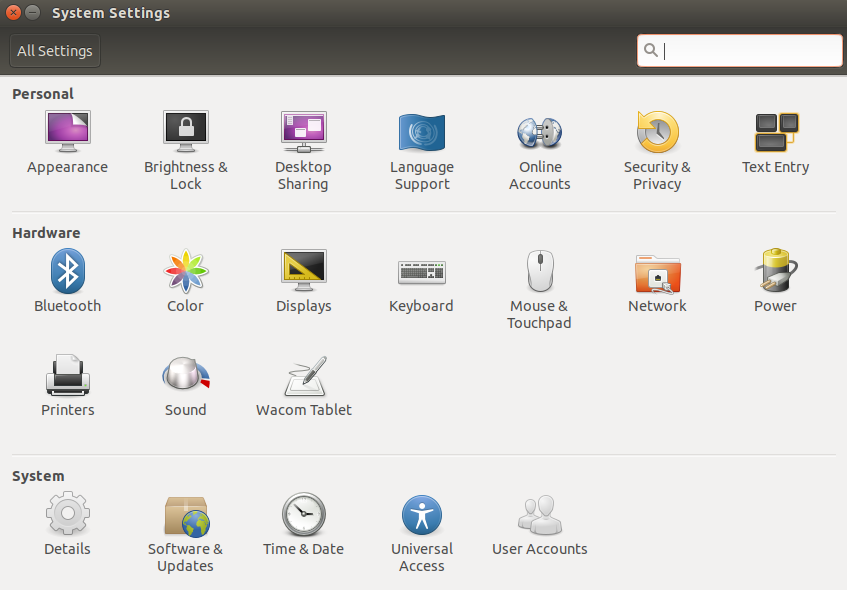
소프트웨어 업데이트가 끝나면 System Settings(환경설정)에 가서 Language support를 클릭한다. 클릭 직후 언어팩을 설치해주는데 꽤 오래 걸린다. 언어팩 설치가 끝나면 꼭 재부팅해주기 바란다.
추가 > 위의 창에서 키보드의 한/영 클릭 > Hangul 보이면 > 확인
③ 밝기와 잠금(필수 X)
일정 시간 동안 입력이 없을 경우 화면이 꺼지거나 잠금이 걸리는 것을 시스템 설정 - 밝기와 잠금에서 해제할 수 있다. 개인 취향에 따라 설정하기 바란다. 나는 밝기 꺼지는 것도 싫지만 자동으로 잠금 상태가 되는게 싫었다.(비밀번호를 매번 치는게 귀찮다.)
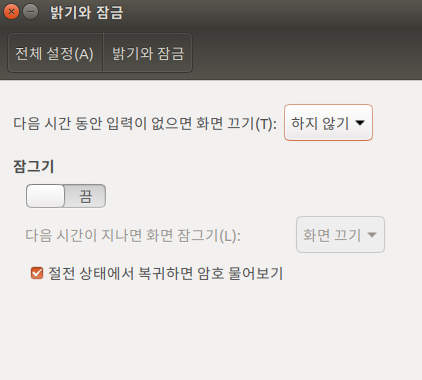
위와 같이 설정하면 화면을 켜진 상태로 유지
④ 저장소(Repository) 확인

시스템 설정 > 소프트웨어 & 업데이트
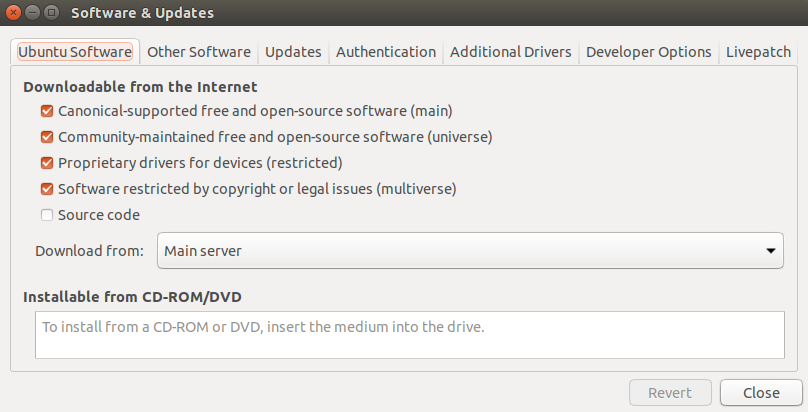
위 사진처럼 main, universe, restricted, multiverse에 모두 체크되어 있다면, 아무것도 건드리지 말고 닫자.
[위 설정창은 시스템 설정 gui 말고도 /etc/apt/sources.list 파일을 클릭하면 열림 디렉터리에 익숙한 사람은 sources.list파일을 편집하지 말고 /etc/apt/sources.list.d 에 새 저장소를 추가하는 것을 추천]
(gui : Graphic User Interface = 보기 쉬운 아이콘)
'IT > ROS' 카테고리의 다른 글
| [ROS] 6. ROS + OPENCV (cv_bridge) 실시간 스트리밍 (22) | 2020.05.20 |
|---|---|
| [ROS] 5. 퍼블리셔-서브스크라이버 메시지 통신 분석 (0) | 2020.01.13 |
| [ROS] 4. 퍼블리셔-서브스크라이버 메시지 통신 (11) | 2020.01.10 |
| [ROS] 3. ROS Melodic 설치 (4) | 2020.01.07 |
| [ROS] 1. SD 카드에 이미지 삽입, 포맷 그리고 백업 (0) | 2020.01.06 |



