☞ 메인보드 : Jetson Nano Developer Kit
☞ 운영 체제 : Ubuntu 18.04 - JetPack 4.3
☞ ROS 버전 : Melodic
☞ 언어 : C++
<이전 포스트>
3. ROS Melodic 설치
메인보드 : Jetson Nano Deverloper Kit 이미지 파일 버전 : JetPack 4.3 ROS 버전 : Ubuntu 18.04 LTS bionic > ROS Melodic <이전 포스트> 2. Jetson Nano 보드에 Ubuntu 18.04 설치 및 환경설정 메인보드 : Jet..
95mkr.tistory.com
목차
○ 3. 서브스크라이버 코드 작성 [listener.cpp]
① 패키지 생성
cs
catkin_create_pkg pub_sub_msg_pkg std_msgs roscpp message_generation actionlib actionlib_msgs
cm
roscd pub_sub_msg_pkg/src
패키지를 생성하는 catkin_create_pkg 명령어를 사용하여 pub_sub_msg_pkg란 패키지와 이 패키지에 사용될 의존성을 붙일 것이다.
talker.cpp 와 listener.cpp 두 파일을 작성하는데 C++ 언어를 사용하므로 roscpp을 추가하고 int, float과 같은 데이터 타입을 제공하는 std_msgs도 추가한다. 만약 python으로 코드를 작성한다면 위와 같은 이유로 rospy를 의존성으로 입력해야한다.
패키지 생성을 마치면 cm(= cd catkin_ws && catkin_make) 명령어로 빈 패키지를 catkin_make 빌드하자.
빌드를 마치면 pub_sub_msg_pkg/src 디렉터리로 이동하고 퍼블리셔 코드를 작성하자.
② 퍼블리셔 코드 작성 [talker.cpp]
[편집기] talker.cpp
pub_sub_msg_pkg/src 디렉터리에서 퍼블리셔, 서브스크라이버 코드를 차례대로 작성한다. 선호하는 편집기나 개발환경에서 작업하자.
#include "ros/ros.h"
#include "std_msgs/Int32.h"
#include <iostream>
int main(int argc, char **argv){
ros::init(argc, argv, "talker");
ros::NodeHandle n;
ros::Publisher pub = n.advertise<std_msgs::Int32>("/numbers", 10);
ros::Rate loop_rate(10);
int count = 0;
while(ros::ok()){
std_msgs::Int32 msg;
msg.data = count;
ROS_INFO("%d", msg.data);
pub.publish(msg);
ros::spinOnce();
loop_rate.sleep();
++count;
}
return 0;
}
③ 서브스크라이버 코드 작성 [listener.cpp]
[편집기] listener.cpp
마찬가지로 src 디렉터리에 다음 코드를 작성하자.
#include "ros/ros.h"
#include "std_msgs/Int32.h"
#include <iostream>
void numberCallback(const std_msgs::Int32::ConstPtr& msg){
ROS_INFO("Recieved: [%d]", msg->data);
}
int main(int argc, char **argv){
ros::init(argc, argv, "listener");
ros::NodeHandle n;
ros::Subscriber sub = n.subscribe("/numbers", 10, numberCallback);
ros::spin();
return 0;
}
④ XML, CMAKE 파일 작성
노드 코드를 모두 작성했으면 코드에 맞게 package.xml과 CMakeLists.txt를 수정한다.
alias 명령어로 .bashrc 에 등록한 cs(= cd ~/catkin_ws/src)로 이동한 후에 pub_sub_msg_pkg 디렉터리로 이동하면 package.xml과 CMakeLists.txt의 존재를 확인할 수 있을 것이다.
[편집기] package.xml
xml 파일은 수정할 필요가 없으나 주석이 너무 많아서 주석들을 모두 제거했다. 주석을 지우고 말고는 본인이 편한대로 하기 바란다.
(nano 편집기는 Ctrl+k 로 한 줄씩 지울 수 있다. )
이 xml 파일에서는 빌드 도구가 catkin이라는 점과 패키지 의존성으로 roscpp와 std_msgs를 썼다는 점을 알 수 있다.
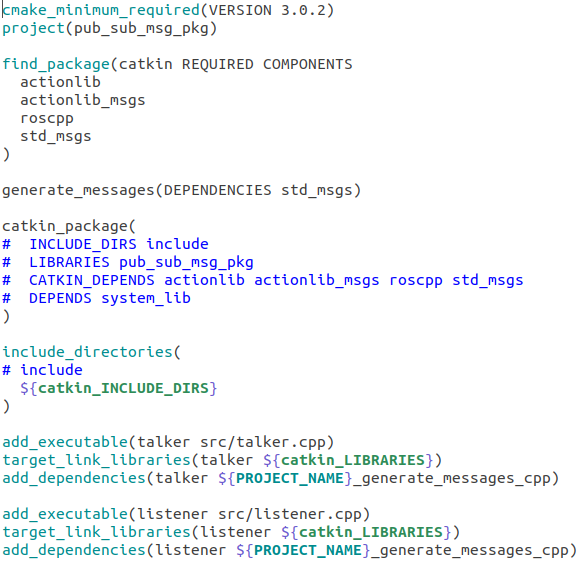
[편집기] CMakeLists.txt
cmake 버전과 패키지 이름, 패키지를 만들때 입력한 의존성(roscpp std_msgs)과 talker 코드, listener 코드의 실행파일 생성을 위한 내용을 CMakeLists.txt에 적어 놓아야한다. [catkin_package의 내용은 주석 처리 되어도 상관없으나 꼭 포함해야지만 에러가 발생하지 않는다.]
해당 명령어에는 순서가 있으니 위 순서를 참고하여 작성하기 바란다.
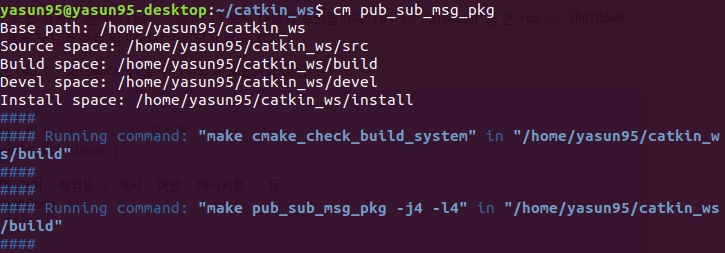
위 작업을 완료하면
cm pub_sub_msg_pkg
입력해주고 빌드한다. [cm = cd catkin_ws && catkin_make]
.bashrc 파일에 alias 명령을 사용하면 다양한 나만의 명령어를 만들 수 있으니 참고바란다.
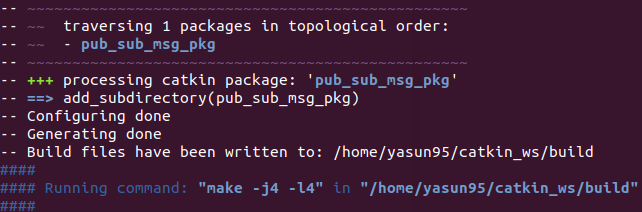
talker와 listener의 빌드가 완료되면 이러한 메시지로 출력될 것이다.

위 작업까지 오류 없이 완료하면 새 터미널을 3개 열고 아래의 세 명령어를 각각 쳐주기 바란다.
roscore
rosrun pub_sub_msg_pkg talker
rosrun pub_sub_msg_pkg listener
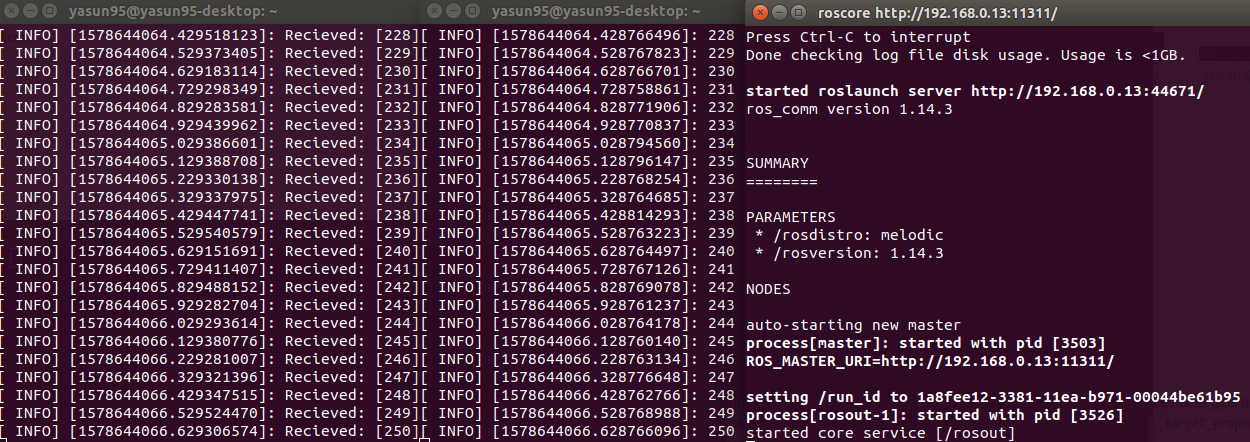
순서대로 listener - talker - roscore 이미지다.
roscore로 ros 실행 준비를 하고, rosrun 명령어로 talker와 listener를 차례대로 실행해준다.
퍼블리셔인 talker는 ++count로 number를 늘려가며 numer 값을 출력하고 있으며 /number 토픽을 통해 서브스크라이버인 listener에 number의 값을 INT32의 데이터 타입으로 수신하고 있다.
이러한 과정은 rqt graph 명령어를 사용하면 마인드맵 형식으로 볼 수 있다.
실행중인 노드의 상관관계를 보여준다.
rqt_graph
입력하면
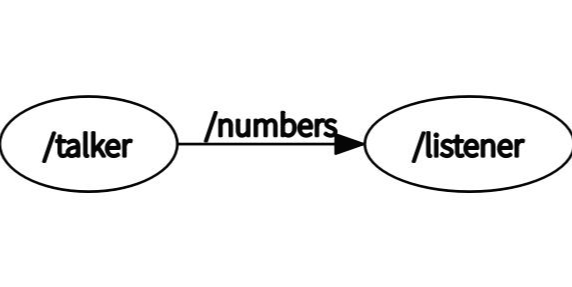
원은 노드이며, 화살표 방향으로 퍼블리셔와 서브스크라이버의 관계를 알 수 있다. 화살표 위에 있는 /numbers는 어떠한 토픽으로 메시지를 송수신하고 있는지 알 수 있다.
참고 ☞ 렌틴 조셉 - ROS 로보틱스 프로그래밍
'IT > ROS' 카테고리의 다른 글
| [ROS] 6. ROS + OPENCV (cv_bridge) 실시간 스트리밍 (22) | 2020.05.20 |
|---|---|
| [ROS] 5. 퍼블리셔-서브스크라이버 메시지 통신 분석 (0) | 2020.01.13 |
| [ROS] 3. ROS Melodic 설치 (4) | 2020.01.07 |
| [ROS] 2. Jetson Nano 보드에 Ubuntu 18.04 설치 및 환경설정 (0) | 2020.01.06 |
| [ROS] 1. SD 카드에 이미지 삽입, 포맷 그리고 백업 (0) | 2020.01.06 |



